 notes |
notes |
 code |
code |
 c.v. [en, fr] |
c.v. [en, fr] |
 mail
mail

Post-doc researcher on robotics and physically-based character animation.
notes |
code |
c.v. [en, fr] |
mail
I'm interested in human motion in general, with an emphasis on the dynamic simulation and control of virtual human characters. Latest work include real-time postural stability analysis from a Kinect camera (project PersoBalance), and activity detection from smartphone accelerometers.
My Ph.D thesis describes a dimension reduction framework for motion capture data that integrates naturally with existing animation systems, either purely kinematic or physically-based. The resulting data-driven, reduced-dimension parametrizations produce quality animations for a small computational cost. Some example results can be seen on the following video:
I am also interested in soft-tissue simulation and contact dynamics, and contributed to the SOFA simulation framework (mostly on the Compliant plug-in). This work provides efficient and stable simulation of stiff materials and constraints, as shown on the following video:
| 2015 | 
|
| 2014 | 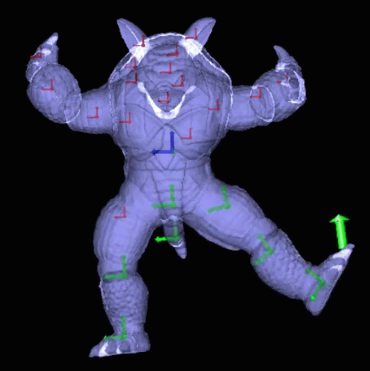
|
| 2012 | 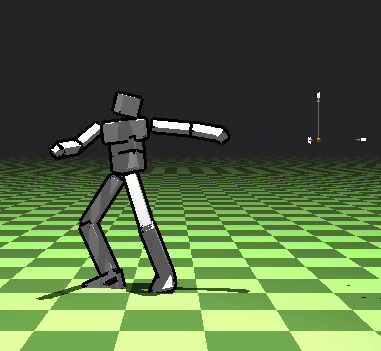
|
2011 | 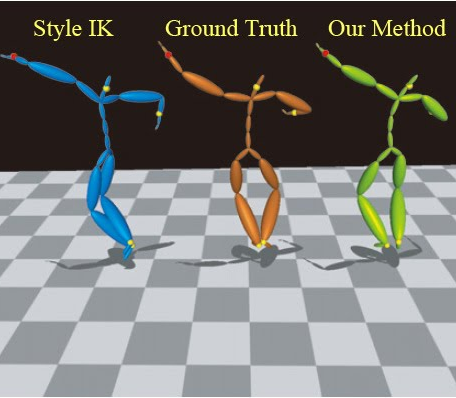
|
| 2009 |
|